- APP介绍
- 相关下载
- 其它版本
- 相关文章
- 人气推荐
RecFusion是一款十分好用的三维重建软件,用于将多个深度图像组合成高质量的三维模型。软件主要用于扫描和建模领域,支持使用深度相机进行实时扫描和重建,用户可以在软件界面中实时看到正在生成的三维模型,内置了引导和帮助功能,方便用户快速了解和使用各种功能,包含各种后期处理工具,帮助用户优化和完善扫描得到的三维模型。
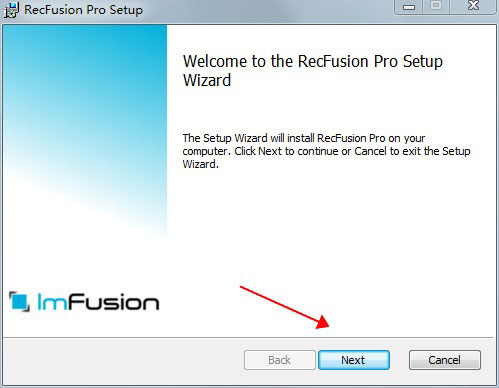
RecFusion Pro安装教程
1、在本站下载解压后,双击"RecFusionProSetup-2.3.0.msi"开始安装
2、Next下一步
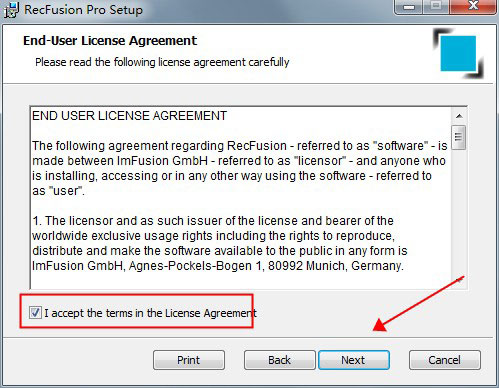
3、I accept接受协议,下一步
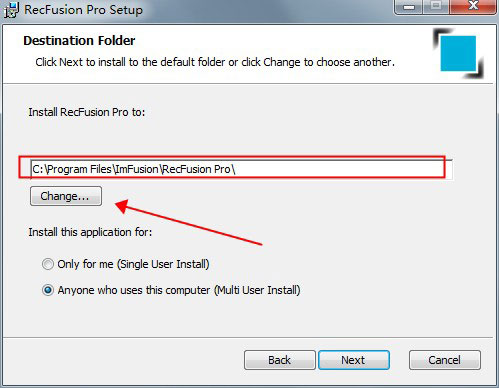
4、系统默认安装在C盘,单击Change可自定义选择安装路径
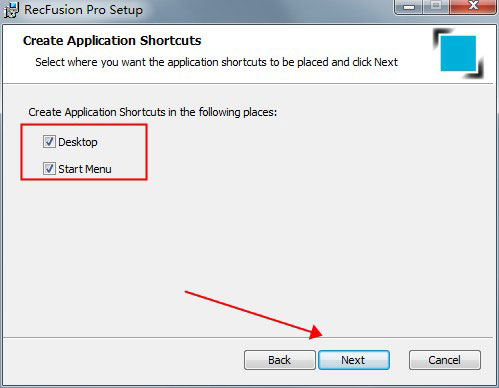
5、是否创建桌面快捷方式以及菜单栏,建议选上,下一步
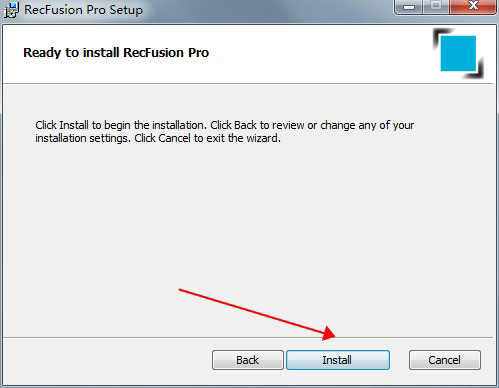
6、Install开始安装
7、正在安装,耐心等待
8、安装完成,Finish退出安装向导,先不要运行软件
软件功能
1、来自多个深度传感器的实时三维重建
2、记录多传感器序列以备后期重建。这对于在需要在很短时间内扫描大量人员的事件期间特别有用。重建和后期处理可以稍后完成
3、使用全彩色传感器分辨率(例如华硕Xtion Pro Live的1280x1024)可产生高质量的色彩
4、支持禁用自动曝光并为支持此功能的传感器(例如Asus Xtion Pro Live)设置手动曝光以改善表面颜色一致性
5、轻松一次性校准多种传感器配置
6、将所有系统设置保存在工作区中。重新加载工作区会恢复所有设置,以便可以立即执行扫描
7、易于使用的扫描后处理功能,如填充孔,裁剪网格和添加套接字
8、导出为流行的网格格式(STL、OBJ、PLY、VRML)
9、易于使用的用户界面
软件特色
1、实时重建
实时交互地重建对象。了解如何在屏幕上建立3D模型并调整摄像头移动以获得最佳效果。
2、高质量纹理贴图
从获取的关键帧应用纹理映射以创建更多逼真的网格
3、记录顺序
记录深度和颜色数据,以供以后查看和重建。这使您可以在同一序列上尝试不同的重建设置以获得最佳结果。您还可以同时记录和重建。
4、支持多个深度传感器
蔚蓝Kinect
英特尔实感D415,D435,D435i,SR305,SR300
Orbbec Astra,Astra S,Astra mini,Astra mini S
PrimeSense深度传感器
Kinect v1(Microsoft Xbox 360 Kinect)
华硕Xtion Pro Live
5、传感器设定
调整传感器设置以获得最佳效果。
使用全彩色传感器分辨率可产生高质量的色彩。
支持禁用自动曝光并设置手动曝光和传感器的白平衡,以支持此功能以改善表面颜色一致性。
6、网格后处理
使用内置的后处理工具清理重建的3D模型。
封闭网格中的孔,使其适合3D打印。
平滑网格并减少三角形数量。
通过删除较小的连接组件或裁剪网格来删除不需要的几何图形。
添加插座以进行更轻松的3D打印。
指定导出网格的大小。
创建空心网格以减少3D打印时的材料消耗。
查看用于纹理化的关键帧,作为网格顶部的覆盖。
7、工作空间
将所有系统设置保存在工作区中。重新加载工作空间将还原所有设置,以便可以立即执行扫描。
8、出口
将3D模型导出为标准文件格式(PLY,OBJ,VRML和STL)。
常见问题解答
1、问:我想建立一个多传感器设置。有什么特别的考虑吗?
答:在构建多传感器设置之前,请考虑以下问题
·每个传感器都需要专用的USB控制器。常规主板最多具有两个控制器。如果要使用两个以上的传感器,则需要一个PCI Express USB扩展卡。请注意,大多数扩展卡的所有端口都只有一个控制器。具有四个端口和四个专用控制器的卡例如是HighPoint RocketU 1144C。
·传感器要观察的区域的重叠应尽可能小,因为观察场景相同部分的某些传感器会相互干扰,从而导致质量测量值降低和深度图中的数据丢失。
·使用转盘设置进行扫描时,应从人的背面而不是面部开始扫描,因为闭合环时可能会出现不对中的错误,而不是在面部上。
2、问:无法识别传感器
答:请确保安装了最新的传感器驱动程序。将多个传感器连接到同一台PC时,请确保每个传感器具有足够的USB带宽。
3、问:是否支持Sensor XYZ?
答:我们仅支持网页上明确列出的传感器。添加了对新传感器的支持后,它将在网页上宣布。
4、问:应用程序无法启动或崩溃
答:崩溃通常与缺少或过时的图形驱动程序有关。请始终从Nvidia或AMD网页安装最新的官方图形驱动程序。
5、问:是否支持诸如Intel HD Graphics的集成GPU?
答:是的。从第四代Intel Core CPU开始,Intel HD图形单元可用于重建。
6、问:扫描失败(红色状态指示灯)
答:红色状态指示灯可能由多种情况引起。一种可能性是在实时模式下重建帧速率太低。重建必须正常工作在10-15 fps以上。较低的重建帧速率是由于GPU上可用的处理能力太低所致。在这种情况下,应降低音量分辨率。也可以非常缓慢地移动相机。如果所有这些都无济于事,建议您记录一个序列并脱机重建它。
重建失败的另一种可能性是场景主要由平面物体(例如,桌面,墙壁等)组成。在这种情况下,将其他非平面对象放置在场景中以使重建算法更好地定位相机可能会有所帮助。在后期处理期间,可以从扫描中删除其他对象。同样重要的是,始终将相机对准重建区域(深度视图中应该有很多绿色区域)。当离开重建体积时,必须重新初始化重建,这在某些情况下可能会失败。
7、问:我可以获取软件的定制版本(例如品牌,硬件集成等)吗?
答:是的。我们可以添加自定义功能,例如商标,硬件集成,将网格上传到自定义在线服务以及将其他功能添加到软件。只需将您的更改请求发送给我们,我们将尽快回复您。
软件亮点
1、实时重建:实时交互式重建对象。 了解3D模型如何在您的屏幕上构建并调整相机移动以获得最佳效果。
2、颜色重建:重建捕捉形式和颜色。
3、CPU重建:即使您的PC没有快速图形卡,也可以创建3D模型。 只需拾取一个对象序列并在处理器上离线重建它。
4、记录序列:记录摄像机的深度和视频数据,以便以后回放和重建。 这允许您在同一序列上尝试不同的重建设置,以获得最佳结果。 您还可以同时记录和重建。
5、任何卷大小:重建体积不限于立方体。 您可以设置任何宽高比。
6、出口:将3D模型导出为标准格式PLY,OBJ和STL,或将其上传到在线打印服务Sketchfab。
7、多才多艺:打印功能来自专业打印提供商的彩色打印件或带桌面3D打印机的单色打印机,如Leapfrog Creatr,Ultimaker 2或UP!
相关下载








人气推荐















相关软件
-
60.4M
1 -
108.24 MB
2 -
36.7MB
3 -
3.1M
4 -
28.31 MB
5









下载排行榜
-
35mb
1 -
1.03 MB
2 - 3
-
49.28 MB
4 -
1.26MB
5 -
25.01MB
6 -
77mb
7 -
6.1 MB
8 -
14.55 MB
9 -
170.71MB
10